By
Dr. Mohamed ElSayed AbdelWahab
Contents:
- Simple Harmonic Motion (SHM)
- Displacement, Velocity, and Acceleration in SHM
- Energy of a Simple Harmonic Oscillator
- Applications of SHM
- Superposition of Two SHMs in One Dimension
- Superposition of Two Perpendicular SHMs
- Vibrations Having Equal Frequencies
- Vibrations Having Different Frequencies
- Damped Simple Harmonic Motion
When a medium is disturbed by a passage of a wave through it, the particles comprising the medium are caused to vibrate. This vibration will propagate in the medium from particle to another with a certain velocity. The process of the propagation of vibrations in the medium is called a wave.
Examples of the oscillatory motion are: the oscillations of a mass on a spring; the vibrations of a stringed musical instrument; the motion of a pendulum; and the oscillations of the molecules in a solid about their equilibrium position. Also, the electromagnetic waves, light waves, are characterized by oscillating electric and magnetic field vectors.
1.Simple Harmonic Motion (SHM)
A particle moving along the X-axis undergoes a SHM if a small displacement X from its equilibrium position set up a restoring force F which is proportional to X and acting in a direction towards the equilibrium position. This restoring force F may be written as:
F = - k X (1.1)
Where K, the constant of proportionality, is called the stiffness and the negative sign shows that the force is acting against the direction of increasing displacement. The stiffness k is the restoring force per unit distance and has the dimensions
K= F/x=MT -2 . Appling
Newton's second law; ![]() we get:
we get:
![]() , where
, where ![]() is the acceleration. This
gives
is the acceleration. This
gives
![]() (1.2)
(1.2)
Where the dimensions of k=T-2.,here T is the periodic time, the time necessary for one complete wave to pass any points, and v=1/T frequency, the number of waves which pass any point in a unit time. Introducing the angular frequency as ω=2πν
so the periodic time is:
![]() (1.3)
(1.3)
if k/m is written as ω2.The equation of SHM becomes:
![]() (1.4)
(1.4)
This is a linear a second-order differential equation governing the motion. It is not the equation of motion. To find the equation of motion we have to solve Eq.(1.4) for x.
2.Displacement,Velocity,and Acceleration in SHM
The behavior of a simple
harmonic oscillator is expressed in terms of its displacement x, its velocity ![]() , and its acceleration
, and its acceleration ![]()
Which are obtained due to the solution of the differential equation(1.4):
Integrate this equation yields
![]() (1.5)
(1.5)
We can write the last equation in the form
![]() (1.6)
(1.6)
Integration with respect to t gives
![]()
where δ is the constant of integration. Thus
![]() (1.7)
(1.7)
Equation (1.7) is a solution of Eq.(1.5)
The limiting values
of ![]() are ±1 so the motion takes place between the limits x=±a and the constant "a" is the maximum value of x, known as the amplitude of displacement.
are ±1 so the motion takes place between the limits x=±a and the constant "a" is the maximum value of x, known as the amplitude of displacement.
The
quantity ![]() is known as the phase of the motion
and δ is known as the phase constant. The form of Eq.(1.7) is shown in Fig.(1.1)
is known as the phase of the motion
and δ is known as the phase constant. The form of Eq.(1.7) is shown in Fig.(1.1)
Fig(1.1):Plot of x against t for SHM
The period T; is also shown in Fig.(1.1); if we add T to t in Eq.(1.7) the value of x must remain unchanged. Hence,
![]() (1.8)
(1.8)
This means that the phase has been increased by exactly 2π radians. Thus by inspection ωT=2π hence
T=2π/ω (1.9)
and
ω=2π/T=2πν (1.10)
ω Is known as the angular frequency of the motion.
Then we can write the equation of motion in more convenient form as:
![]() (1.11)
(1.11)
The values of the velocity and acceleration of a particle undergoing SHM are given by:
![]() (1.12)
(1.12)
and
![]() (1.13)
(1.13)
Thus the acceleration is proportional to the displacement but is in opposite direction, as can be seen from Fig.(1.2).
|
Fig(1.2) variation with time of displacement, velocity and acceleration where δ=0
Note that at any specified time the velocity is π/2 out of phase with the displacement and the acceleration is π out of phase with the displacement. Since the sinr and cosine functions oscillate between ±1 , then the maximum value of the velocity and acceleration are given by ωa and ω2a, respectively.
3. Energy of a Simple Harmonic Oscillator
The fact that the velocity is zero at maximum displacement in SHM and is a maximum at zero displacement illustrates the important concept of an exchange between kinetic and potential energy. It is known that for motions, the total mechanical energy E which is the sum of kinetic energy KE plus the potential energy PE, is conserved.
E= KE + PE=KEmax=PEmax (1.14)
The kinetic energy at any instant is given by:
KE= 1/2mv2
Using the relations v=a ω cos(ωt+δ) and ω2=k/m gives:
KE=1/2 m ω2a2 cos2(ωt+δ) (1.15)
The kinetic energy has a maximum value of 1/2 m ω2a2 or 1/2ka2 During the motion, the kinetic energy varies between zero and this maximum value, as can be seen from the curve in Fig.(1.3).
The potential energy PE, at any instant is given by:
PE=1/2kx2
=1/2 ka2 sin2(ωt+δ) (1.16)
The potential energy has a maximum value of 1/2ka2 . During the motion the potential energy varies between zero and this maximum value, Fig.(1.3). The total energy is the sum of KE plus PE:
E= KE+PE =1/2 m ω2a2 cos2(ωt+δ) +1/2 ka2 sin2(ωt+δ)
E=1/2ka2 (1.17)
Fig.(1.3): Kinetic energy KE versus displacement for SH oscillator. Note that KE+PE=const.
Thus the total energy is constant and has the value 1/2ka2 which it is proportional to the square of the amplitude of the motion. At the equilibrium position, the PE is zero, but 1/2ka2 . At other positions, the kinetic and potential energies have different values but their sum is always a constant equal to 1/2ka2. .
In order to obtain the velocity at any displacement x, let us use the energy conservation relation:
E=KE +PE=1/2mv2 +1/2kx2 =1/2ka2
thus
![]() (1.18)
(1.18)
Or
![]() (1.19)
(1.19)
This relation shows clearly that the speed is a maximum at the equilibrium position x=0 and is zero at maximum displacement x=a.
4.1. The Simple Pendulum
Figure (1.4) shows a simple pendulum consisting of a cord of length l having a particle of mass m attached to its free end and making an angle θ with the vertical.
The forces acting on m are its weight (mg) and the tension acting along the cord. The tangential component of the weight is the restoring force mg sin θ acting on m tending to return it to the equilibrium position.
F= - mg sin θ,
But sin θ= x/l and by using Newton's second law (![]() ) we have:
) we have:
![]()
Or
![]()
Which represents SHM with angular frequency
![]()
and Period
T=2π/ω =2π![]() (1.21)
(1.21)
Notice that T is independent of m and depends only on l and g.
Let a body of mass m is attached to a spring of force constant k and
free to move over a horizontal frictionless surface. If the body is displaced
to the right, Fig.(1.5), the force exerted by the spring on the body is
directed to the left and is F = - kx, by using
Newton's second law (![]() )
)

![]() or
or ![]() ,
,
the solution of this equation must be that of a SHM
x= a sin(ωt+δ)
with ![]() and period
and period
T=2π![]() (1.22).
(1.22).
5. Superposition of Two SHMs in One Dimension
5.1. Vibrations Having Equal Frequencies
To find the resulting motion of a system which moves in the x-direction under the effect of two SHMs of equal angular frequencies but of different amplitudes and phases, we can represent each SHM by its vector and carry out a vector addition.
If the displacement of the first motion is given by:
X1=a1 cos(ωt+δ1), (1.23)
and that of the second by:
X2=a2 cos(ωt+δ2) (1.24)
Then Fig.(1.6) show that the resulting displacement amplitude R is given by:
R2=(a1+a2 cosδ)2 + (a2 sinδ)2 (1.25)
where δ=δ2 – δ1 is constant. The phase constant θ of R is given by:
![]() (1.26)
(1.26)
so the resulting SHM has the displacement
X= R cos(ωt+θ) (1.27)
an oscillation of the same frequency ω but having an amplitude R and phase constant θ.
5.2. Vibrations Having Different Frequencies:
Suppose we now consider what happens when two vibrations of equal amplitudes but different frequencies are superposed. If we express them as:
X1 = a sin(ω1 t) (1.28a)
and
X2 = a sin(ω2 t) (1.28b)
Where ω2 > ω1 , then the resulting displacement is given by:
![]() (1.29)
(1.29)
This expression is illustrated in Fig.(1.7). It represents a sinusoidal oscillation at the average frequency ( ω1 + ω2 )/2 having a displacement amplitude of 2a which varies between 2a and zero under the influence of the cosine term of a much slower frequency equal to ( ω1 - ω2 )/2. Acoustically this growth and decay of the amplitude is known as "Beats"
Fig.(1.7)
6. Superposition of Two Perpendicular SHMs
6. 1. Vibrations Having Equal Frequencies:
Suppose that a particle moves under the influence of two SHMs of equal frequency, one along x-axis, and the other along the y-axis. The displacements may be written as:
x = a1 sin(ωt + δ1) (1.30a)
y = a2 sin(ωt + δ2) (1.30b)
The path followed by the particle is formed by eliminating the time t from Eqs. (30a,b) to leave an expression involving only x,y and the constants δ1 and δ2 . Expanding the arguments of the sines we have
x/a1 = sin(ωt)cos(δ1) + cos(ωt)sin(δ1) (1.31b)
and
y/a2 = sin(ωt)cos(δ2) + cos(ωt)sin(δ2) (1.31b)
If we carry out the process
![]()
this will yield
![]() (1.32)
(1.32)
Which is the general equation for an ellipse with δ = δ2 - δ1 . The form can be determined, and the curve sketched by putting specific values of x and y into Eq.(1.32)
When
x=0 y=± a2 sin(δ) ,
y=0 x=± a1 sin(δ) ,
x=±a y= ± a2 cos(δ) ,
y=±a2 x= ± a1 cos(δ) .
These points are plotted to give the curve shown in Fig.(1.8)
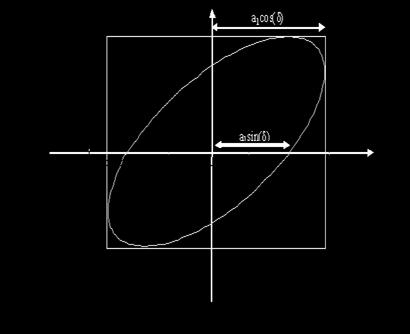
Fig.(1.8): superposition of two perpendicular SHMs of equal frequency.
In the most cases of the ellipse are inclined to the x and y axes, but these become the principal axes when the phase difference
δ = π/2, 3π/2……….(2n+1)π/2 , n=0,1,2 ……
Equation (1.32) take the form
![]() (1.33)
(1.33)
That is, an ellipse with semi-axes a1 and a2, Fig.(1.9c). If a1 = a2 = a this becomes the circle, Fig.(1.9d),
x2 + y2 = a2 (1.34)
When δ= 0, 2π, 4π, ……. 2nπ, n=0,1,2,……………………
Equation (1.32) take the form
y = a2/a1 x (1.35)
the ellipse degenerates into a straight line with slope a2 /a1.
Again if
δ= π, 3π, ……. (2n+1)π, n=0,1,2,……………………
y = -a2/a1 x (1.36)
a straight line with opposite slope –a2/a1. For δ= 0, 2π…………...., the ellipse degenerates into a straight line. The resulting vibration lies in one plane and the oscillations are said to be plane polarized. Similarly, the other values of δ yield circular or elliptic polarization.
Fig.(1.9): Paths traced by a system vibrating in two perpendicular directions.
7. Damped Simple Harmonic Motion:
In the previous sections, we assumed that there are no energy losses in the vibrating system so that the interchange between kinetic and potential energy causes the vibration to continue with amplitude "a" forever. This ideal system is not true in practice, the amplitude of the vibration decreases until the motion stops. The decay of the vibrations is due to the presence of frictional resistance of the surrounding medium on the mass. These energy losses cause the amplitude of vibration to decreases exponentially with time and the system is said to vibrate with damped harmonic motion.
Fig. (1.10)
The presence of resistance to motion means that another force is active, Fig. (1.10), which is taken as being proportional to the velocity. The new equation of motion becomes:
![]() ,
,
Or
![]() (1.37)
(1.37)
where r is the constant of propagation. When the coefficients m, r and k are constants, a solution of the form x=Ceαt can be found.
Taking C as a constant length and substituting by x in Eq.(1.37) yields
![]() ,
,
So that either x=Ceαt = 0, which is trivial solution or
![]() ,
,
from which
![]() (1.38)
(1.38)
The displacement can now be expressed as
![]() (1.39)
(1.39)
The bracket ( r2/4m2- k/m) can be positive, zero or negative depending on the relative magnitude of the two terms inside it.
Each of these conditions gives one of the following three solutions:
1. Bracket positive ( r2/4m2> k/m). The system is known as heavy damping.
2. Bracket zero ( r2/4m2=k/m). The balance between the two terms results in a critically damped system.
3. Bracket negative ( r2/4m2< k/m). The system is highly damped and gives oscillatory damped simple harmonic motion.
Notice that, neither (1) nor (2) gives oscillatory behavior.
Case 1. Heavy Damping
Writing p=r/2m and q= ( r2/4m2- k/m)1/2, we can replace Eq.(1.39) by
x=e –pt(C1eqt+C2e-qt) (1.40)
Let F=C1 + C2 and G= C1 - C2 then:
X=e-pt[F cosh(qt) + G sinh(qt)] (1.41)
If the displacement x=0 at t=0 then F=0, and
![]() (1.42)
(1.42)
Figure (1.11) shows such behavior when the system is distributed by a sudden impulse. It will return to zero displacement, creeps back or relaxes, quite slowly without oscillating about its equilibrium position.
Fig. (1.11): Non oscillatory behavior of heavy damping
Case 2. Critical Damping ( r2/4m2=k/m)
Using the notation of case (1), we see that q=0 and x=Ce-pt. since α in Eq. (1.38) has equal roots, C must be written as C=A+Bt with A and B are constants. Then,
X=(A+Bt)e-pt
Or
X=(A+Bt)e-rt/2m (1.43)
It is very similar to that of case (1), as shown in Fig. (1.12), but depending on the values of constants
Fig. (1.12): Non oscillatory behavior of critical damping
Case 3. Damped Simple Harmonic Motion
When ( r2/4m2< k/m) the damping is light, and this gives the most important kind of behavior, oscillatory damped simple harmonic motion. The expression ( r2/4m2- k/m)1/2 is imaginary quantity which can be rewritten as:
±( r2/4m2- k/m)1/2=±i(k/m
- r2/4m2)1/2
; ![]()
So the displacement
![]() (1.44)
(1.44)
We can write (k/m - r2/4m2)1/2 = ω’2 where ω’ is the angular frequency of the damped system. Then
x=e-rt/2m(C1eiω’t + C2e-iω’t) (1.45)
If we choose C1=A/2i eiδ and C2=-A/2i e-iδ where A and δ are constants, we find that:
x= A e-rt/2m sin(ω’t+δ), (1.46)
Which has the same form as Eq. (1.7) but the amplitude term a in (1.7) has been replaced by Ae-rt/2m and the angular frequency ω has become ω’.
If x=0 at t=0 then δ=0; Fig. (1.13) shows the behavior of x with t. The presence of the force term r x. in the equation of motion introduces a less of energy which causes the amplitude of oscillation to decay with time as e-rt/2m.
Fig. (1.13): Damped oscillatory motion